
Grade 8
1. How can you help old people using Robotics?
[open-ended descriptive Question]
[Based on the above condition present your Idea]
[Based on the weight of the idea Marks will be awarded]
2. What is the chassis? How to Build a Chassis for a Sajilobot?
chassis is a Lower Body frame of an automobile. It connects the wheel at the bottom and the Vehicle body at the top.

We can easily Build a chassis for Sajilobot.
1 Measure Sajilobot (L=115cm, B=9cm)
2. Cut a Cardboard a little bit bigger than Sajilobot as well as places to Mount wheels.
3. Create a Mount for Sajilobot and to keep the battery
4. Add Motors to the chassis.
3. What is a Breadboard? Why is it useful?
A board is a device where we can make solderless Connections. It is a very useful device.
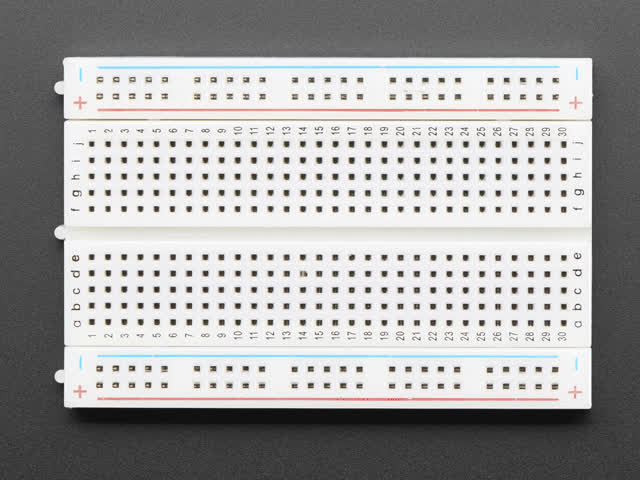
Uses:-
1. Create Temporary connections
2. Test Components & circuits
3. Prototype
4 build devices.
1. How to Make a Bluetooth-controlled car?
To Make Bluetooth controlled car we need the following Materials
1. HC-05 (Bluetooth module)
2. Bo-Motors,
3. chassis etc.
Steps
1. Make a chassis for the Car.
2. Add Motors and wheels to the chassis
3. Add Sajilobot at the top and wire accordingly.
4. Add Battery holder and Batteries.
5. Connect Bluetooth Module
Since we are using a Bluetooth module, we need to add Arduino code compatible with Bluetooth.
5. Write 5 Arduino codes from blink.
- delay() - Adds a slight delay in Mili-sec
- pinMode() - Sets the mode of the pin
- digital write() - writer digital value to the pin
- void setup() - Add your setup code here
- void loop() - Add your Loop code here
Grade 7
1. What is an LED greeting card? Explain.
→LED Greeting card works by applying a basic LED Circuit to a simple greeting card
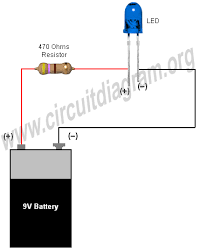
We Make a paper circuit inside a Greeting card So that the LED Glows when pressed
Materials required
1. Greeting card
2. LED & Resistor (if reqd)
3. Battery
4. Aluminum foil (as wires)
5. Tape
Steps:-
1. Create a hole to fix the LED and connect the terminals to aluminum foil
2. Create a Contact Switch on either side (Positive /negative)
3. Connect the battery to the aluminum foil (make Sure it is Connected properly)
4. Tape the whole build.
2. What is Soldering? What are the things required for soldering?
Soldering is the process of connecting wires in a circuit board to fix the connections permanently.

Materials required:-
1. Soldering iron
2. Soldering wire
3. flux
4. Iron Stand
5. Safety Masks.
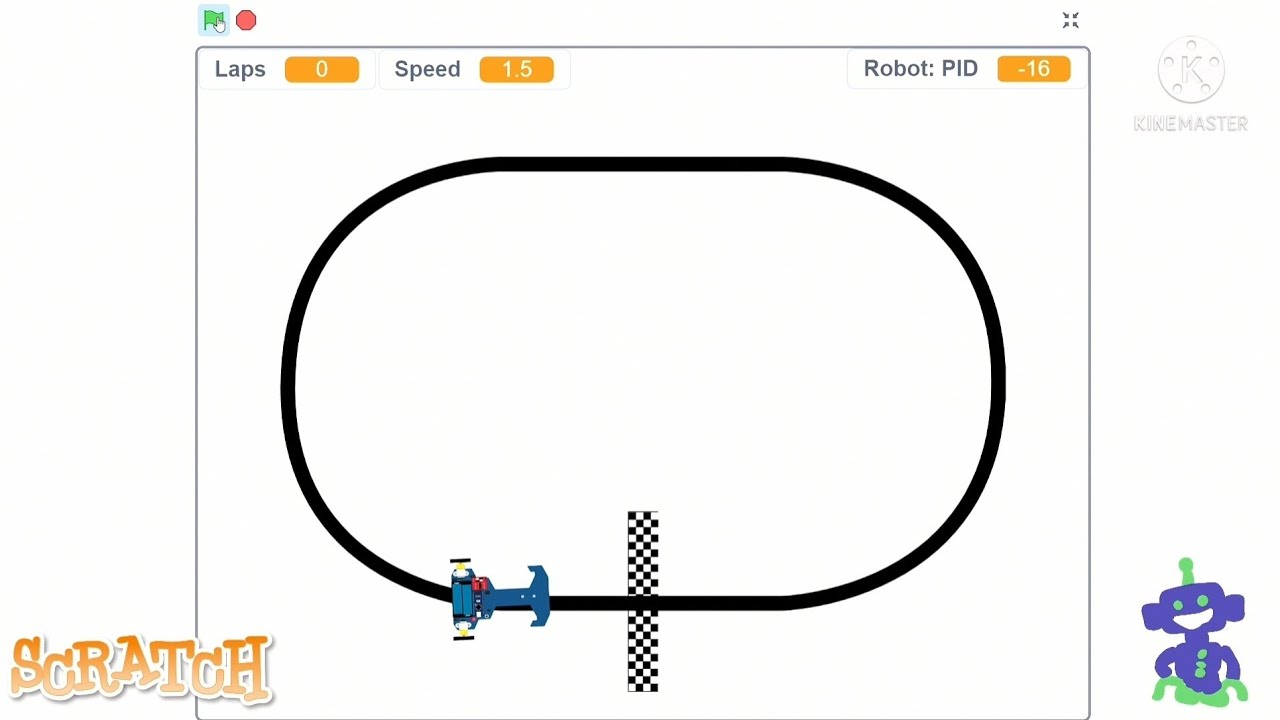
3. Explain the Line follower car
Line follower car is a simple robot that uses IR sensors to detect a Black line and follow it.
Here's how it works:
Eyes (Sensors): The robot has special eyes called sensors. These sensors can see the ground and tell whether they are on the line or off the line.
Brain (Microcontroller): Inside the robot, there's a tiny brain called a microcontroller. It's like the robot's smart computer. It gets information from the sensors and makes decisions about what the robot should do.
Legs (Motors): The robot has legs, which are little wheels with motors attached to them. These wheels help the robot move.
Instructions (Code): Someone, like you or a programmer, gives the robot a set of instructions, like a recipe. These instructions tell the robot what to do when it sees the line.
Now, let's say we draw a black line on a white surface, like a path. The robot's job is to follow this path. The logic behind the line follower car is given below:
If (Left Sensor detects black)
→Go straight
If (R.S. detects black)
→ Go straight
If (L.S. detects White)
→Turn Right
If (R.S. detects black)
→Tum Left.
Grade 9
1. What are Satellites? How can we build one?
Satellites are objects primarily Revolving around planets, The Moon is our natural satellite. Artificial Satellites are Man-made Satellites that perform Specific Mission or tasks while orbiting a planet
Building a Satellite:-
There are various types of Satellites, today we are discussing picosat
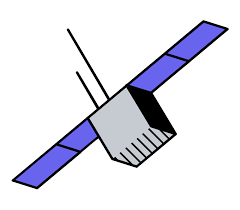
Size(5cmx5cmx5cm) -1P
Weight-[100-1000) Grams
Other names:- Pocket cube
Various Modules in Satellites:-
1. Power Module:- It takes care of Power Management
2. On-Board computer:- processes Information for the Satellite
3. Communication Module: It helps us communicate with the Ground station
4. Payload Module:- hosts sensors and data recording devices.
By following the above description and adding appropriate Modules we can easily build a Satellite.
2. What are Sensors? explain
Sensors are devices that can Sense Various activities, Gestures, etc. They can also be called detectors or Input devices.
LDR (Light-dependent Resistor) → LDR is a light-based sensor.

If the Light level is Low, we can only see a small voltage, But If the Light Level is high, we can see/read a big voltage from LDR.
3. Building a Battlebot using SajiloBot
We can easily Make a Battle Bot using Sajilobot by following the steps & procedure
Materials required
1. Sajilobot
2. Bo-Motor & Wheels
3. Outer Body of Battle Bot
4. Jumper wires
5. Battery holder & Batteries
Steps:
1. Make a Case/Housing (chassis) for our Sajilobot to keep it safe
2. Attach Motors and wheels to our chassis
3. Add Battery holder and wire connections accordingly
4. Create holes + Connect electronics.
5. Add a Weapon Mechanism
6. Decorate your battle bot.
Since we will be using a Bluetooth module we need to add Bluetooth-compatible code.
4. Give 5 examples of Arduino code with their uses.
The examples of Arduino code with their uses are given below:
Void setup → we add our setup code in this code
Void Loop → we add our looping code in this code.
pinMode→ Sets the Mode of the pin
Analog Read → Reads the analog value of a pin
digital Read → Reads the digital value of a pin
digital Write → writes the digital value to a pin
5. What is an Obstacle detection robot?
Obstacle obstacle-detection Robot is a type of Robot that can detect obstacles and change directions accordingly. We use an ultrasonic sensor with Sajilobot to Make an obstacle-detection Robot.
CODE:
// Motor Driver Configuration
const int motor1Pin1 = 2; // Input 1 of Motor 1
const int motor1Pin2 = 3; // Input 2 of Motor 1
const int motor2Pin1 = 4; // Input 1 of Motor 2
const int motor2Pin2 = 5; // Input 2 of Motor 2
// Ultrasonic Sensor Configuration
const int trigPin = 9; // Trigger pin of the ultrasonic sensor
const int echoPin = 10; // Echo pin of the ultrasonic sensor
void setup() {
Serial.begin(9600);
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void moveForward() {
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
}
void moveBackward() {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}
void turnLeft() {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
}
void turnRight() {
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
}
void stopMotors() {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
}
void loop() {
// Read distance from ultrasonic sensor
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration / 2) / 29.1;
// Print distance to Serial Monitor
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Check if there is an obstacle within a certain range
if (distance < 20) {
// If obstacle detected, stop and turn
stopMotors();
delay(500);
// Backward and turn right
moveBackward();
delay(500);
stopMotors();
delay(500);
turnRight();
delay(500);
stopMotors();
delay(500);
} else {
// If no obstacle, move forward
moveForward();
}
}
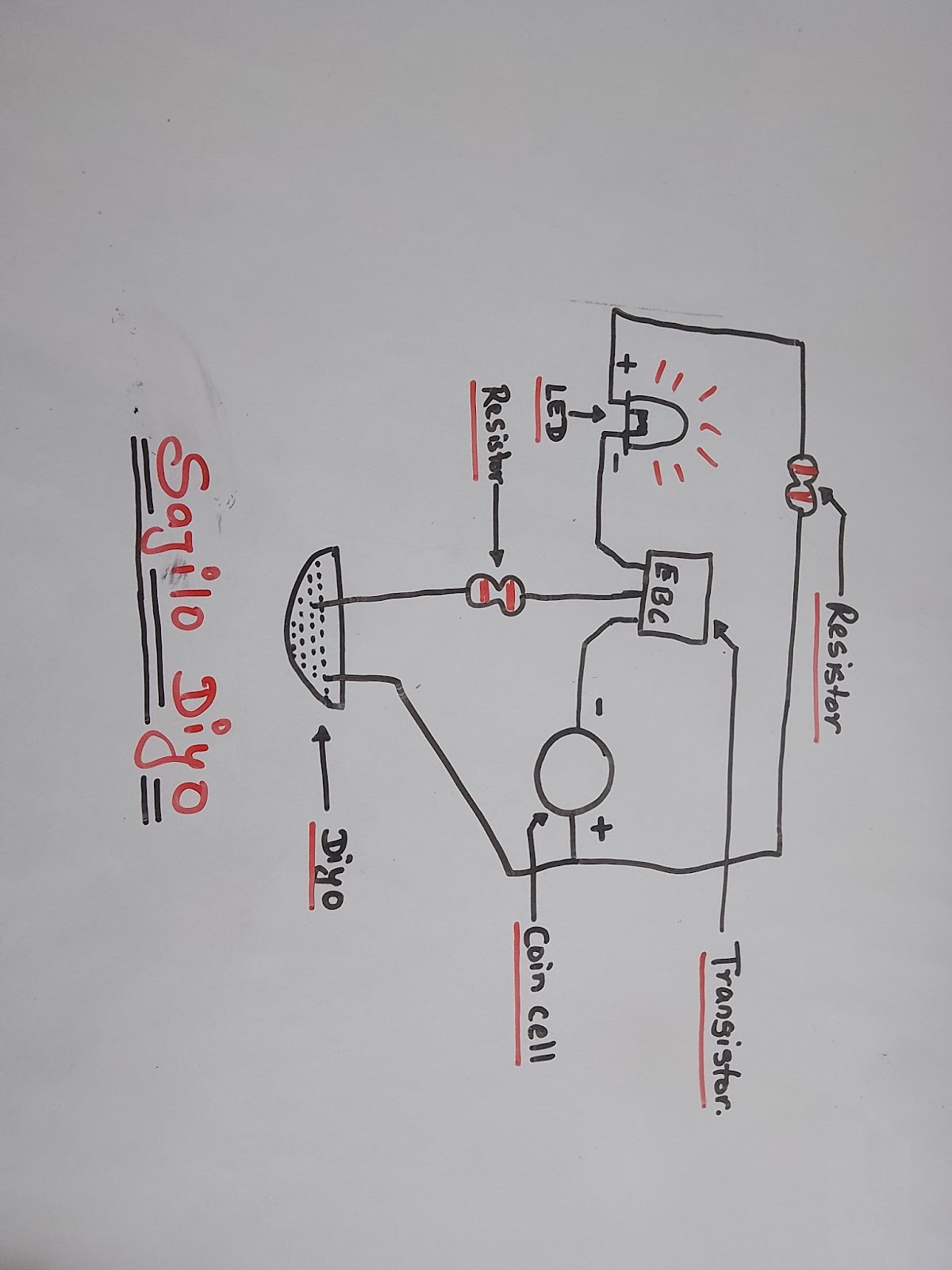
How does Sajilo Diyo work? Explain in detail (5)
Sajilo Diyo is an easy-to-make water diyo that incorporates simple electronic components to glow LED in the presence of water
Components:
LED
Coin Cell
Transistor
Wires
Resistors and Diyo
List 5 mBlock codes used for SajiloBot with their uses (5)
The block codes for sajilobot are listed below:
When sajilobot starts
Set digital pin (6) as (high)
Read analog pin
Read digital pin
distance(mm) in obstacle
What tools are required to tinker with cardboard? How can you make a box for SajiloBot? (5)
The Tools Required for Tinkering with Cardboard:
Cardboard sheets are used as the primary material for the robot body.
Cutting tools (scissors or utility knife): For cutting and shaping the cardboard.
Ruler and measuring tools: For accurate measurements and dimensions.
Markers or pencils: For marking and drawing on the cardboard.
Glue or tape: For assembling the cardboard pieces.
Decorative materials: Optional, for adding flair to the robot.
Making a Box for SajiloBot:
Measurements: Determine the dimensions needed for the box based on the size of the SajiloBot.
Cutting: Cut the cardboard sheets according to the measurements.
Folding: Use a ruler to create straight and precise folds along the cut lines.
Assembly: Apply glue or use tape to attach the sides of the box. Ensure that the edges are securely connected.
Reinforcement: Add additional pieces of cardboard or reinforcement at the corners and seams for stability.
Openings: Cut openings for the wheels, sensors, or any other components of SajiloBot.
Final touches: Decorate or label the box if desired.
How can we help Farmers with robotics?
Helping Farmers with Robotics:
Planting Seeds:
We can create special robots that help plant seeds in the fields. These robots can move along the rows and gently put seeds into the ground, making it faster and easier for farmers to grow crops.
Watering Crops:
Robots can be designed to carry water and move through the fields, making sure each plant gets the right amount of water. This helps farmers save time and ensures that all the plants grow healthy and strong.
Harvesting Crops:
Imagine robots with special arms that can carefully pick fruits and vegetables when they are ready to be harvested. This helps farmers collect their crops efficiently, especially for big fields.
Checking Soil Health:
Some robots can have sensors to check the health of the soil. They can tell the farmers if the soil needs more nutrients or if everything is just right for the plants to grow well.
Scaring Away Birds:
Robots equipped with noise or light features can help scare away birds that might eat the crops. This protects the farmer's hard work and ensures more food for everyone.
Draw a robotic art involving Sajilobot helping solve our social problems.
You can create an art piece showing SajiloBot in action, perhaps assisting with a simple task like picking up objects or navigating through a maze. The art could showcase the educational aspect by incorporating school-themed elements and the SajiloBot.
[marks awarded based on art and the idea behind]

![OPENSCAD basics for beginners [20 example projects to try]](https://blogger.googleusercontent.com/img/a/AVvXsEiRikRyApbOpHmM_tg5HQ353R54ld2h8kaufXZZIh6TVDkx0AXBHafoAX1E55tWU3osAB2K1A9qYK0q-NnsvAXbrVGg3ZRjXFrjCkFhJZSFzllkSPeQ6C8cTGtRBH05f9YZ-hc3c43NglYPU3UstvXkB1RjVwKY9UgXBLcr6KEfMw0Kagv4w-rsln0TSj_F=w72-h72-p-k-no-nu)







0 Comments